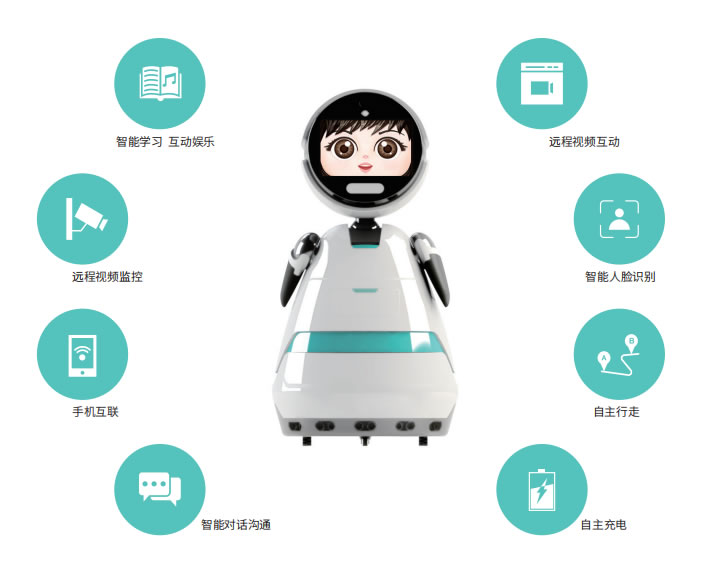
ųŪ─▄┼Ń░ķÖCŲ„╚╦▓╔ė├ÖCŲ„╚╦ęĢėXŽĄĮyĪó╔ŅČ╚šZę¶Į╗╗źŽĄĮyĪóŽ╚▀MĄ─šZę¶ę²ŪµŻ¼┤Ņ▌dŁhą╬¹£┐╦’LĻć┴ąŻ¼▀\ė├┬Ģ┐žūRäeĪóšZ┴x└ĒĮŌĪó╚╦─śūRäeĪóŪķŠwūRäeĄ╚ĻPµI╝╝ągŻ¼į┌Ėąų¬é„ĖąŲ„▀MąąĘĆČ©£╩┤_Ąžąąū▀ĪóšZę¶║Ž│╔Īó└ĒĮŌ┼cūRäeĪŻÖCŲ„╚╦▓╔ė├įŲŲĮ┼_╝ė▒ŠĄž╗»šZę¶Äņų¦│ųĖ„ĘNą┼Žó’@╩ŠŻ¼▒ĒŪķš╣╩ŠĪóė|├■▌ö╚ļĄ╚╚╦╣żĮ╗╗ź▀^│╠ĪŻ╔Ž╬╗ÖC▓╔ė├ Linux ┼c Android ▓┘ū„ŽĄĮy═©▀^┤«┐┌ĘĮ╩Į┼cŽ┬╬╗ÖC═©ą┼Ż¼┐žųŲ▓┐Ęų═©▀^ Can ═©ą┼ĘĮ╩Į▀BĮėĖ„ĘNé„ĖąŲ„▓╔╝»═Ō▓┐ą┼ŽóĪŻš¹éĆ▄ø╝■ŽĄĮy░³└©ÖCŲ„╚╦Č╦ĪóĘ■äšŲ„Č╦Īó╩ųÖCČ╦Ż¼═©▀^ŠWĮj═©ą┼ĘĮ╩Į═Ļ│╔ÖCŲ„╚╦╗ź┬ōĪŻ«aŲĘŠ▀éõŖ╩śĘĪóįńĮ╠Īó┼ŃūoĪó░▓Ę└Ą╚╣”─▄Ż¼┐╔ė├ė┌╝ę═ź┼ŃūoĮ╠ė²╝░▀h│╠▒O┐žĘ└ūoĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |